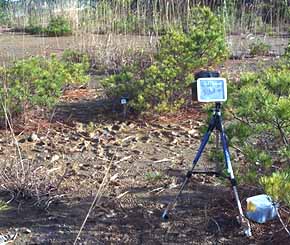
 カメラはニコンFE,FM
カメラはニコンFE,FMロボットカメラとは赤外線センサーを接続したカメラのことです。夜行性の動物の姿をこれで見てやろうというのです。
カメラはニコンFE,FM
43-86ズームニッコール
ケンコーの赤外線センサー
防水加工は食品用のタッパーウエアを細工して使っています。
センサーの固定にコツがいることと,ストロボやセンサーのバッテリーの工夫がポイント
 餌は鶏肉(鶏頭がよく知られているが今回は手羽を使用)と柿。
餌は鶏肉(鶏頭がよく知られているが今回は手羽を使用)と柿。
フィルムはネオパン400プレストをY2フィルタで使用。

センサーに時計を張り付けて撮影時刻がわかるようにしている。
観察を続けている足跡の主は誰か。その姿を見てみたいと思いました。また,来年調査に生徒を引っぱり出すには,意欲を持たせるためにも実際に動物の姿を見せる必要がある,しかし夜中の観察に年中連れ出すわけにはいきません。そこでシカ研OBで県教育センターの渋間先生の記録と「アサヒカメラ教室・ネイチャーフォト」を参考にロボットカメラを工夫し,餌で誘って写真を撮ってみることにしました。生徒の活動として応用すれば,きっと罠猟のイメージで熱中し,地味な聞き取りや生痕調査などの動機になるのではないかとの期待もあります。
ロボットカメラは赤外線センサーとカメラ,ワインダー,ストロボからなり,使いながらバッテリーなどに改良を加えてきました。タッパーを使った防水ケースは完璧な使い心地ですが,センサーのバッテリーと固定法には改良の余地があり,日によっては誤作動で36枚撮りのフィルムが全て無駄になることもあります。各バッテリーの寿命などから,今は4夜1セットで3セット行い,3枚に4匹のタヌキが写りました。1セットのコストは6000円くらいかかり,ばかになりません。
 動物の顔が写ったら個体識別したいと考え,キツネではその可能性に期待をふくらませています。宮城県七ヶ宿の「キツネ村」に沢山のキタキツネが飼育されています。私は2回訪れて個体識別できるか実験を行いました。1回目に同じ個体の写真を数枚ずつ撮影し,現像してその特徴を記録しました。顔の下半分の白い毛に混じる黒い模様は1個体ごと様々な個性を見せていました。2回目には特徴の記録と写真をもって,その個体を探しました。今ロボットカメラで撮ったタヌキでも同様の識別ができないか検討中ですが,いずれもう少し枚数がないと何とも言えないようです。
動物の顔が写ったら個体識別したいと考え,キツネではその可能性に期待をふくらませています。宮城県七ヶ宿の「キツネ村」に沢山のキタキツネが飼育されています。私は2回訪れて個体識別できるか実験を行いました。1回目に同じ個体の写真を数枚ずつ撮影し,現像してその特徴を記録しました。顔の下半分の白い毛に混じる黒い模様は1個体ごと様々な個性を見せていました。2回目には特徴の記録と写真をもって,その個体を探しました。今ロボットカメラで撮ったタヌキでも同様の識別ができないか検討中ですが,いずれもう少し枚数がないと何とも言えないようです。
またセンサー側部に時計を付けて一緒に写しこんだので,タヌキが餌を食べに来た時間もわかりました。11/22は午後10時7分,12/1は午後11時37分,11/28はマツの枝で文字盤がかくれて不明ですが,ちょっとだけ見える短針が夜中の12時前後にも見えます。タヌキはわずかの休息以外は一晩中餌を探し歩いているとの報告があり,この地を訪れる時刻は比較的夜中が多いのかも知れません。
ところでカメラの前に動物を立たせるために,餌を何日も連続して置きました。これは言うまでもなく不自然なことで,動物の生活を多少なりとも変化させることになります。実際カメラの周辺の足跡のつきかたには若干の変化が見られました。それが餌の為なのかどうかははっきりしませんが,「餌づけ」を安易に(深い検討無しに,また無批判に)行うことは避けるべきと思っています。しかし,直接観察のための効果的な方法であることは確かです(餌づけによって観察内容が変化するかもしれないが)。